
What do batteries, dynamite, and tin cans have in common? They’re all products of the Industrial Revolution, a period from the mid-1700s to mid-1800s that brought about mechanized manufacturing and the modern factory system. Today’s post is about how the inner workings of 19th-century steam engines invented during the Industrial Revolution might help us make sense of why animals walk the way that they do.
No work at all…
But first, we’re going to have to put in some work to understand the concept of “work.” All objects, from a pencil to a penguin, have energy stored up inside of them. There are lots of different types of energy, but the two most basic ones are called “kinetic energy” and “potential energy.” In general, the faster an object is moving, the more kinetic energy it has, and the higher off the ground it is, the more potential energy it has.
Energy can also be transformed from one type to another. If you imagine a perfectly frictionless roller coaster, a cart that starts on top of a big hill will have a lot of potential energy, which will then be transformed into kinetic energy at the bottom of the hill, and so on. If, like in this roller coaster example, the total amount of energy doesn’t change — the energy just changes type — we say that “no work” has been done on the system.

There are lots of practical situations where objects can move without work being done, like when wheels spin, skates slide, and pendulums swing. Animals don’t roll around on wheels, but scientists who study locomotion think that walking may have evolved to minimize the amount of mechanical work that needs to be done by the animal — and thus the amount of energy an animal uses up by moving. So, what does the Industrial Revolution have to do with this?
A new study
In a new study in Integrative Organismal Biology, J. Usherwood from the Royal Veterinary College in the United Kingdom did a whole lot of work to figure out if quadrupedal animals could hypothetically walk with no work at all. To do so, Usherwood explored two different linkage mechanisms used in steam engines during the Industrial Revolution: Watt’s linkage and Peaucellier’s linkage.
Animals have rotational parts — their joints — that they use to create a translational motion — to walk forward. Both Watt’s and Peaucellier’s linkages also use rotational parts to create a translational motion with no work:


Usherwood examined sprawling locomotion (like what crocodilians and tortoises do) through the lens of Watt’s linkage, and parasagittal locomotion (like what horses and elephants do) through the lens of Peaucellier’s linkage. He found striking similarities between these linkages and the real way that animals walk, and supported these similarities with measurements of forces taken during locomotion.
These similarities led Usherwood to conclude that although no animal works with truly zero work, his Industrial-Revolution-inspired framework might explain much of why animals, especially sprawling animals, walk the way that they do.
Moving forward
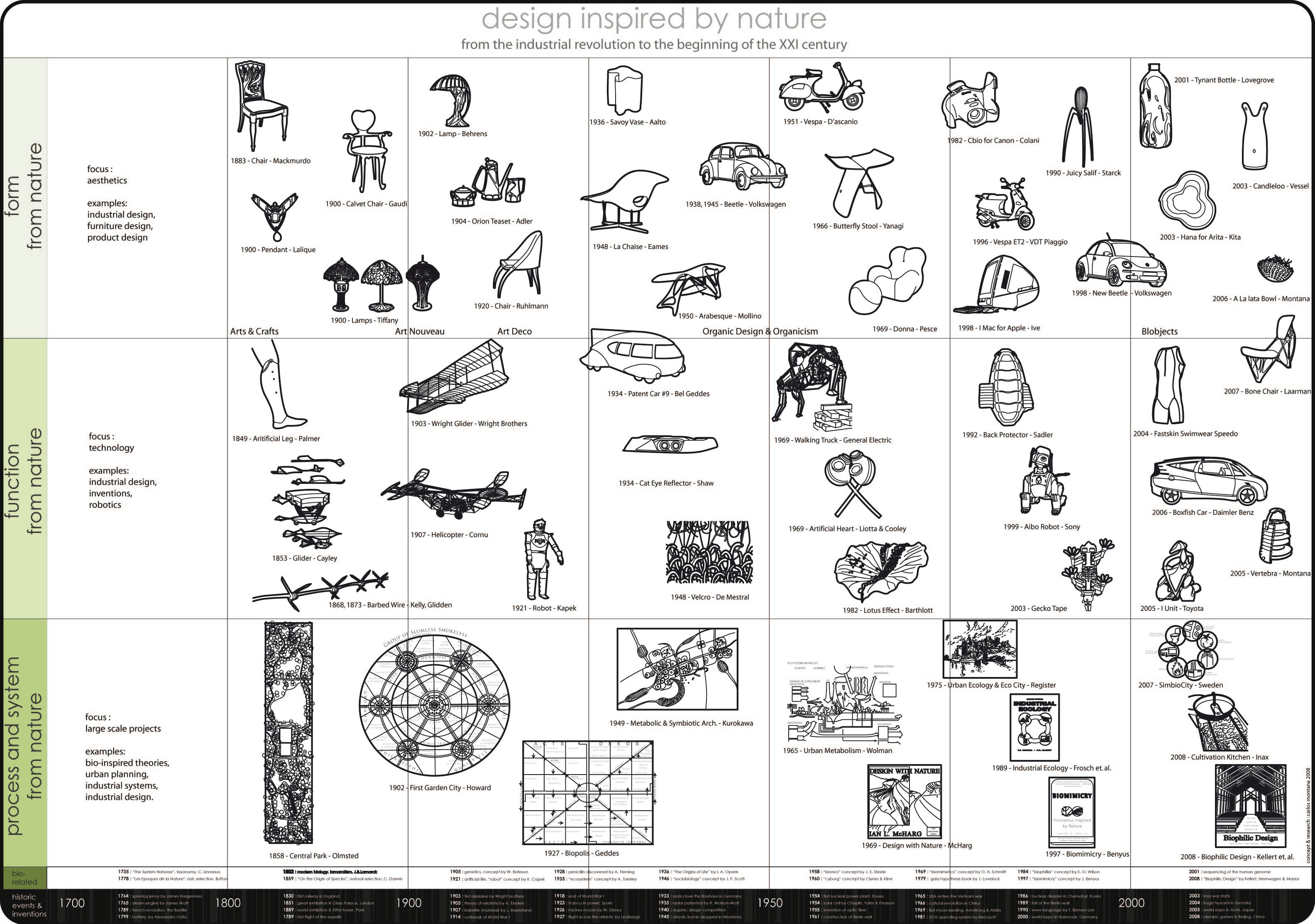
Traditionally, engineers have turned to biological systems in pursuit of “bio-inspired” designs. These efforts have led to common household goods like Velcro, medical devices like artificial hearts, and athletic gear like “shark-skin” drag-reducing swimsuits. They’ve also led to the creation of kinetic sculptures like Strandbeests that aim to recreate lifelike animal motion.

Usherwood’s paper takes this approach and turns it on his head: he studies mechanical systems to better understand biological ones. Usherwood’s success in drawing similarities between Watt’s and Peaucellier’s linkages and quadrupedal locomotion demonstrates the great potential that machines have to teach us about the way that animals move. It might just take us ~non-zero work~ to figure it all out…
So in the meantime, keep checking out iobopen.wordpress.com for the latest in cool, organism-centered biology!
By Armita R. Manafzadeh
Armita R. Manafzadeh is a PhD candidate studying the evolution and development of joint mobility at Brown University. Her interests include functional morphology, vertebrate paleontology, and biomechanics.

{kind=link}
{kind=link}
{kind=link}